
Con el propósito de ofrecer soluciones para mejorar la calidad de vida de pacientes con algún tipo de parálisis motora, investigadores de la Universidad del Valle de México (UVM), desarrollaron Interfases Humano Máquina -sistemas de asistencia y rehabilitación a través de señales fisiológicas-, lo cual ha permitido la fabricación de una gorra que controla silla de ruedas y lentes que, a través de movimientos oculares, permiten comunicación de un paciente con cuadriplejia.
El Dr. Francisco David Pérez Reynoso, investigador del Centro de Investigación, Innovación y Desarrollo Tecnológico (CIIDETEC-UVM) y líder de este desarrollo, explicó que:
A través del entrenamiento de sensores con inteligencia artificial, es posible la fabricación de estos dispositivos, los cuales no son invasivos y están personalizados de acuerdo con la necesidad de un paciente por su movimiento muscular, ocular o movimientos mecánicos.
Uno de los principales problemas de los avances que existen, es el grado de personalización para aplicar terapia de rehabilitación o para adaptar un sistema de asistencia a las características individuales de los usuarios, de ahí la importancia de este trabajo.
Por otro lado, de acuerdo con la Organización Mundial de la Salud (OMS), al 2020, más de 1 millón de personas tenían algún tipo de discapacidad a nivel mundial, de ellas alrededor de 190 millones tiene dificultades de su funcionamiento que requerían servicios de asistencia. Mientras que en México el Censo de Población y Vivienda 2020 reveló que en este país hay más de seis millones de personas con algún tipo de discapacidad, de las cuales 48% tiene problemas de movilidad para caminar, subir o bajar.
El investigador indicó que para conseguir que una máquina o un dispositivo se adapte a las caraterísticas o necesidades de una persona, utilizan la inteligencia artificial, es decir, se entrena la HMI de tal forma que independientemente de la señal o el sensor que se le coloque a la interfaz, ésta lo puede interpretar como un comando de control, o comando de movimiento, de esta manera la máquina interpreta los movimientos que hace el usuario y no el usuario se tiene que adaptar a la máquina.
Lo anterior permite una disminución de tiempo significativo (un par de semanas en lugar de meses) para la adaptación del robot asistencial.
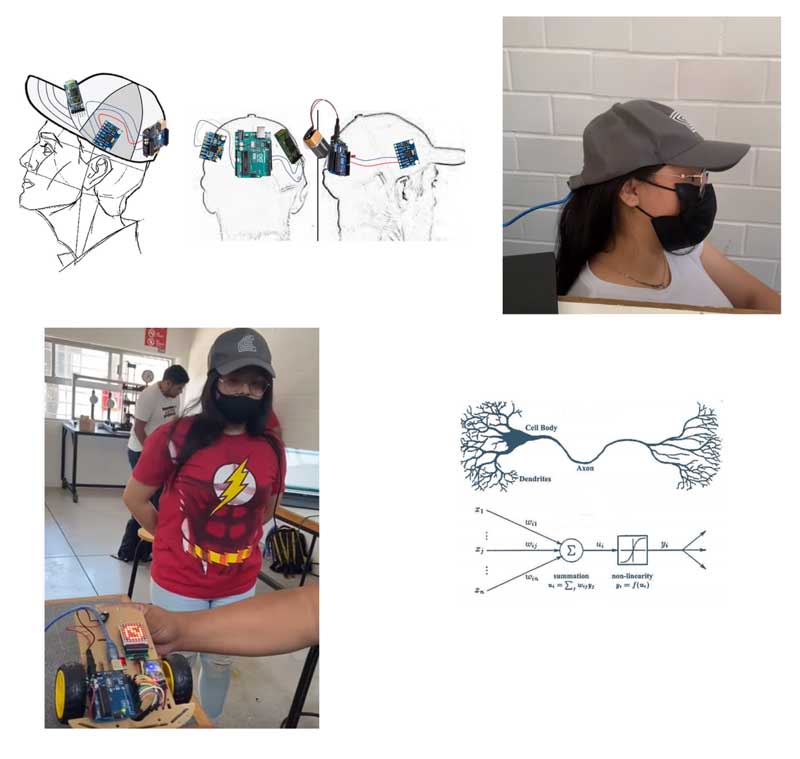
Ejemplo de ello, es la fabricación de una silla de ruedas, que consistió en un coche controlado con movimientos de la cabeza y una red neuronal, para posteriormente implementarlo en la silla de ruedas. La red neuronal se entrena de tal forma que entiende los comandos para poder tener el control. Otro de los trabajos realizados fue el desarrollo de unos lentes asistenciales, los cuales, a través de señales musculares a través del ojo, el paciente podía escribir texto.
El investigador Pérez Reynoso, comentó que este desarrollo considera una línea de investigación multidisciplinaria, en donde colaboraron especialistas de mecatrónica, electrónica, inteligencia artificial, robótica y biomédica, provenientes de los CIIDETEC de UVM de Campus Querétaro, Tuxtla y Guadalajara, además participan estudiantes de ingeniería de los mismos Campus.